"Quem quer ser um carro autônomo?" é um exercício de confiança orientado a dados que usa realidade aumentada para ajudar as pessoas a simpatizarem com os sistemas de veículos autônomos.
“Criamos uma máquina de direção não convencional que permite que as pessoas usem mapeamento tridimensional em tempo real e reconhecimento de objetos exibidos em um fone de ouvido de realidade virtual para navegar pelo espaço.”
“Atualmente, as discussões sobre o futuro da mobilidade estão focadas, entre outras, nas possíveis mudanças em grande escala impostas pelos carros autônomos. De particular interesse é a viabilidade técnica e a viabilidade comercial dos sistemas de automóveis autônomos, e as questões que surgem em várias camadas em que nossas vidas serão afetadas pela inteligência artificial. Na maioria dos casos, esses desafios e perguntas estão sendo enfrentados a portas fechadas e em contextos específicos do domínio e geralmente são inacessíveis ao público em geral.”
“Nosso objetivo é aproximar as pessoas dessas discussões, experimentando novas experiências de mídia imersivas e protótipos interativos. O que acontece quando as pessoas conseguem simpatizar com os carros autônomos? O que podemos descobrir quando as pessoas são forçadas a "ver o mundo" através de sensores e a tomar decisões com base em dados, probabilidades e estatísticas? E como podemos usar novas tecnologias como VR para alcançar melhor o público que normalmente não se envolve com esses tópicos?”
O projeto pretende ser um protótipo de empatia, criando situações nas quais o motorista e os espectadores próximos se tornam parte de uma conversa sobre responsabilidade, (des)confiança, fascínio e, talvez, esperança para um mundo que está se movendo em direção à mobilidade autônoma.
G1
Who Wants to Be a Self-Driving Car?
Referências bibliográficas:
https://www.creativeapplications.net/vvvv/who-wants-to-be-a-self-driving-car-empathising-with-self-driving-vehicle-systems/
https://www.move-lab.com/project/selfdriving/
https://starts-prize.aec.at/en/who-wants-to-be-a-self-driving-car/
https://www.daimler.com/innovation/case/autonomous/self-driving-car-project-moovel.html
https://benedikt-gross.de/projects/who-wants-to-be-a-self-driving-car
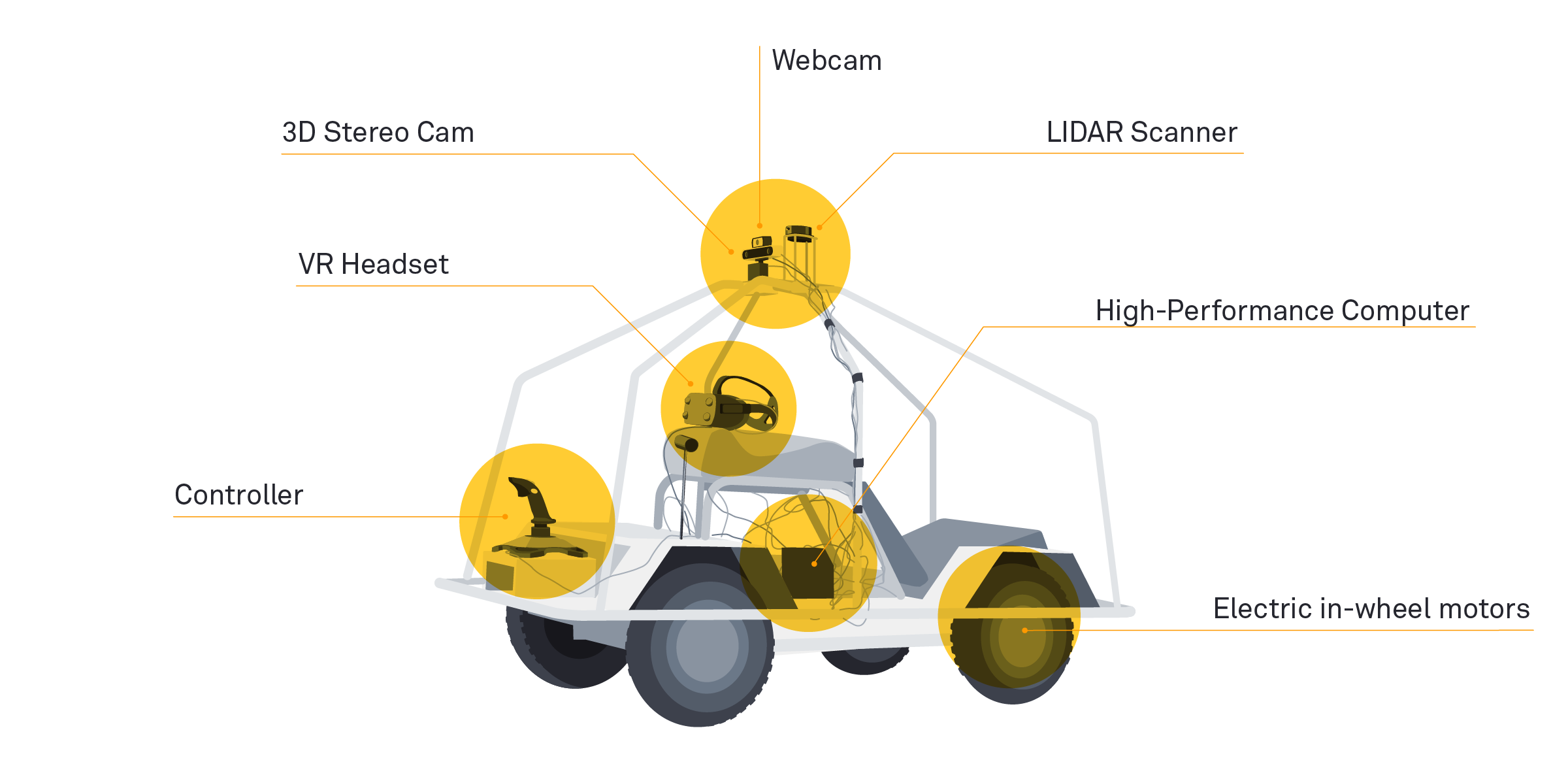


O laboratório moovel colaborou com a MESO Digital Interiors para prototipar essa experiência imersiva. A ideia era fabricar uma máquina que substituísse os sentidos humanos pelos sensores que um carro autônomo poderia usar. Nossa máquina motriz não convencional é essencialmente um carrinho de estrutura de aço com motores elétricos nas rodas, completo com quebra hidráulica. Os motoristas deitam a cabeça primeiro no veículo; o posicionamento usado para melhorar a sensação de imersão (e vulnerabilidade) criada durante a experiência. Um volante físico controla a rotação do veículo.
A experiência de VR é criada usando dados coletados pelos sensores equipados na máquina de dirigir. A vista principal é uma apresentação de dados de uma câmera de profundidade 3D - ZED Stereo Camera - que usa imagens estereoscópicas para mapear a paisagem em tempo real. O mapeamento 3D da vizinhança do veículo é complementado com a detecção de objetos visuais usando a biblioteca YOLO nos dados de uma câmera da web padrão, ajudando o motorista a entender melhor o que os rodeia.
Uma câmera de vídeo também é equipada na parte traseira do veículo, permitindo que o motorista veja enquanto está em marcha à ré. Por fim, um sensor de detecção e alcance de luz (LIDAR) - Slamtec RPLidar - adiciona uma camada adicional de sensor de distância enviando pulsos de luz do sensor para objetos próximos e calculando o tempo de retorno bidirecional.
Esses componentes são reunidos no fone de ouvido VR - Oculus Rift - usando VVVV e o 3D Unity Game Engine para fornecer aos motoristas os dados que eles devem interpretar para navegar na máquina motriz pelo espaço, substituindo essencialmente a unidade de controle de um veículo autônomo por uma pessoa . Existem 2 computadores a bordo do buggy - um PC e um NVIDIA Jetson TX2. O PC pega os dados da câmera de profundidade 3D e do lidar e também recebe os objetos detectados da placa Jetson TX2 executando o software de detecção de objetos YOLO. Os objetos detectados são enviados via OSC para VVVV, que compõe a visualização como mencionado acima, a 90 fames por segundo.
“Quem quer ser um carro autônomo?" é uma ferramenta para explorar a tecnologia por trás de carros autônomos sob uma perspectiva humana. O projeto pretende ser usado como uma plataforma acessível para todas as pessoas compartilharem suas percepções, sentimentos e pensamentos sobre as muitas maneiras pelas quais sensores, dados, computação e mobilidade estão interligados. A evidência anedótica das interações das pessoas com o projeto varia de crítica a esperançosa e aterrorizada a empoderada; algumas dessas reações podem ser vistas no vídeo da documentação do projeto acima.
Ao "tornar-se um carro autônomo", esperamos que as pessoas possam se identificar com os pontos fortes e os desafios que as tecnologias autônomas introduzirão. Para a maioria, o projeto é um ponto de entrada para uma conversa sobre carros autônomos e seus possíveis impactos na sociedade (por exemplo, como estruturamos nossas cidades, compartilhamento de carros, entrega de mercadorias). Para alguns, no entanto, o projeto suscita questões mais profundas sobre as novas maneiras pelas quais a inteligência artificial, sensores e mobilidade estão conectados. Não é certo quando os carros autônomos chegarão à estrada em larga escala, mas como os carros autônomos afetarão a sociedade como um todo, depende de como as pessoas possam se envolver com esses futuros tópicos sobre mobilidade.
Sobre os responsáveis:
Joey Lee (EUA) é um designer de interação praticante e tecnólogo criativo, formalmente treinado como pesquisador em Geografia (BA, MSc), especificamente em métodos experimentais para mapear e monitorar ambientes urbanos. Benedikt Groß (DE) é um designer especulativo e computacional que trabalha antidisciplinarmente. Ele possui um mestrado em Interações de Design pelo Royal College of Art. Raphael Reimann (DE) é um urbanista multidisciplinar. Ele rapidamente encontrou a interseção de serviços digitais em ritmo acelerado e infraestrutura persistente da cidade como um campo extremamente interessante e desafiador. Como parte do moovel lab, eles trabalham em um ambiente criativo, colaborando com pessoas diferentes. O moovel lab trata de explorar idéias e tecnologias relacionadas ao que nos move em nosso ambiente urbano. MESO Digital Interiors é um estúdio de design com sede em Frankfurt que cria sistemas digitais para espaços comunicativos. Sebastian Oschatz, Theron Burger, Johannes Lemke, Sebastian Kujas, Timon Skerutsch e Urs Hofmann formaram a equipe do MESO. David Leonard é jornalista, artista, diretor de vídeo, escritor, tecnólogo e educador com sede em Los Angeles.
Análise pessoal:
Para mim, o projeto é tão importante quanto os seus próprios criadores acreditam ser, pois é capaz de nos inserir ainda mais nas tecnologias que estão sendo criadas. É uma simulação que está fora do habitual (por exemplo, experiências apenas com os óculos VR e cinema 4D), mais do que nunca te coloca no lugar do carro autônomo. Como isso pode vir a ser uma realidade comum futuramente, entender exatamente como funciona e ter confiança (ou não) nesses aparelhos são de extrema importância.
O vídeo do próprio projeto nos dá um gostinho de como deve ser participar e mostra a reação das pessoas, muitas vezes, confusas, algumas desconfortáveis até. Algo que chamou a minha atenção foi quando um dos usuários disse que parecia que estava voando, que isso o fez acreditar mais na tecnologia ao mesmo tempo que instigou a sua imaginação. Pela posição e movimento realizados, foi logo o que imaginei de primeira.
Sobre o projeto em si, de acordo com minha pesquisa, acho que ele realmente segue o partido adotado que propõe. Mas, acredito que deva ser muito desconfortável estar nessa situação, eu mesma preferiria estar sentada só com os óculos VR, mas, ao mesmo tempo, não teria a experiência completa. E, considerando também que muitas pessoas ficaram mais desconfiadas/assustadas ainda em relação a tecnologia, acho que a simulação poderia ser feita sem se colocar em campo (dentro de uma sala) e sentir o objeto em si, mas a partir de roupas com sensores que simulariam todos os movimentos do carro e vibrações dos motores posição vertical do corpo, mas numa superfície mais estável.
Além disso, acho que esse tipo de simulação deveria ser considerada mais vezes, feita com outros objetos como esse.